一、ElasticSearch的基础分布式架构
1.1.ES对复杂分布式机制的透明隐藏特性
ES是一个分布式系统,为了对应大数据量,ES对于复杂的分布式机制隐藏了很多特性
- 分片机制:我们使用时,es自动的就将创建的document存入集群中了,这时就要思考ES是如何分片的?数据存放到哪个shard中了?
- 集群发现机制:当配置分布式节点时,启动第二个节点会发现直接就加入到集群了,ES是怎么做到自动发现集群的?不仅加入集群,还将部分数据存储到自己上
- shard负载均衡:当有3个节点时,9个shard会自动均匀的分配到节点上
- shard副本:副本是如何创建且自动冗余的
- 请求路由
- 集群扩容
- shard重分配:当有新节点加入,shard会重新分配
1.2.ES的扩容
ES分为水平扩容和垂直扩容:
例子:公司要存储6T数据,现在有6台服务器,现在需要存8T数据,便要扩容
- 垂直扩容:买两台强大服务器,每台能存2t的,替换旧的2台。这种扩容成本高,会有瓶颈
- 水平扩容:买两台能存1t的服务器加入到集群中,这种常用且成本较低。
1.3.节点增减时的rebalance
可以发现,ES对于节点负载均衡处理很厉害。
一般情况下,总有些节点会负载比较重的数据or分片,例如有5台服务器,有6个shard,就会有一台负载2个shard,这时如果添加一台服务器进来,es会自动的把2个shard分1个给新服务器,即ES的rebalance
1.4.master节点
es集群会有主节点与普通节点之分,一般来说先启动的节点为主节点。
对于主节点主要进行全局元数据的操作,如索引的创建删除,节点的创建删除,master节点不会如平常集群一样需要对所有请求进行响应,即造成单点瓶颈,而是对等获取请求。
1.5.节点对等
ES的分布式节点是对等的,即每个节点都能接收到所有数据,是由ES来分配的,并且如果请求的数据不在此节点上,该节点会自动转发给具有此数据的节点,即自动请求路由,并接收返回数据,最终返回给用户,即响应收集。
二、分片机制
2.1.shard&replica机制再梳理
- index包含多个shard:ES先将shard分配到对应的节点上,再将索引index分配到多个shard上
- 每个shard都是最小工作单元,承载部分数据,并且存放一个Lucene实例,具有独立处理请求操作的能力
- 增减节点,具有负载均衡能力
- 每个document只能存在唯一的分片与其对应的replica上,不可能存在多个分片上
- 主shard创建索引时固定,但是replica数量可以再修改
- shard默认5片,replica默认1
- shard和replica不能放在同一个节点(故障时主副分片数据都丢失,没有意义)
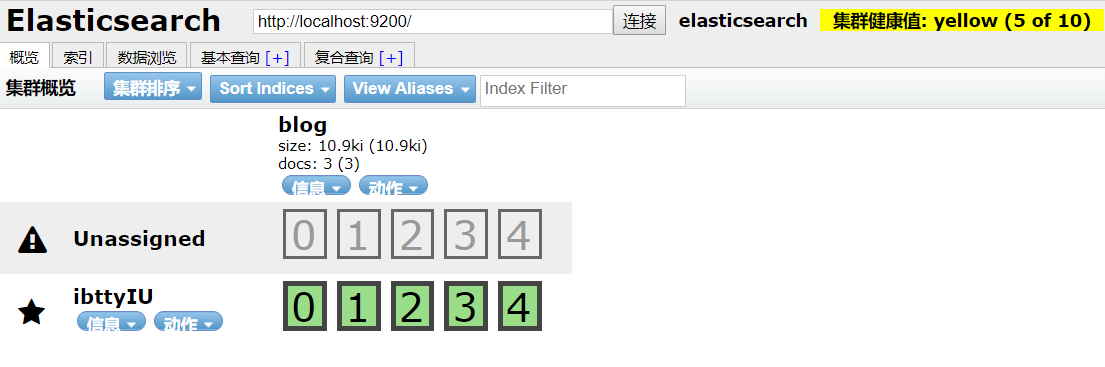
2.2.单node情况创建index
- 单node创建index,分配5个shard,会有5个replica
- 集群状态是yellow
- 5个shard存放在一个node上,而replica未分配处在Unassigned状态
- 如果node宕机,会造成数据全部丢失,且集群不可用,无法接收请求
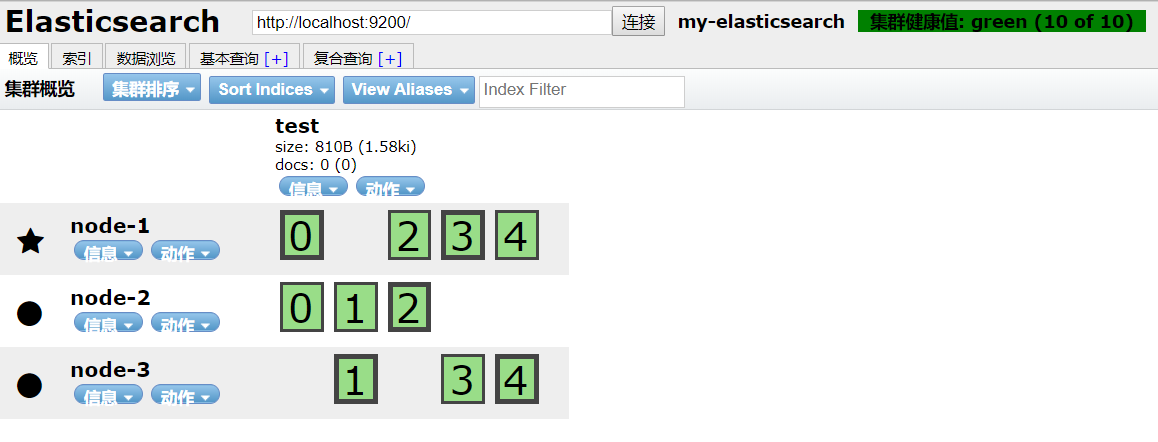
2.3.多node情况下创建index
- 多个node创建节点,对于shard和replica会均匀的分配到多个节点上
- 当有数据存储时,primary shard会自动同步到replica上
- 当有读请求时,primary shard 和 replica都可以接收请求做出响应
三、ES扩容与容错性
两个node对比一个node来说,会有更好的性能,因为每个shard所占用的CPU/IO等资源更多
3.1.极限扩容
对于6个shard来说,扩容的极限为6台node,每台一个shard
3.2.超出扩容极限
如果想要超出极限,应该怎么做呢?可以添加副本replica数量,多加3个便可以多加三台机器
3.3.容错性
当我们有三台node,3个primary shard,3个replica时,根据ES自动分片,状态如下:

1)这时我们如果宕机一台node-1,还存在的shard为:P0,R1,R2,P2.可以发现数据全部还存在,所以此时可以容错一台机器。
2)如果我们宕机两台node-1,node-2,还存在的shard为:P2,R1,数据便少了P0的,即少了1/3的数据,便不完整。
所以3台node,6个shard的容错性是1台机器。如何提高容错性呢?
我们在基础上添加3个replica试试,根据ES自动分片,结构如下:

这时人如果宕机两台,仅存node-3:R0-2,R1,P2,数据完整,即可以容错2台机器!
所以再实际环境中,我们应该学会如何扩容提高性能,并且对于不同的node与shard状态,我们应该学会怎么提高容错性。
四、ES容错选举
当我们的机器宕机后,ES是如何进行容错选举并恢复的呢?
还是以上面的例子为例,假如node-1为master node并且宕机
1)ES第一步会选择一个node作为新的master node,比如node-2,这时的集群状态为red,因为P1这个primary shard因宕机没有处于actived状态。status = red。
2)第二步会将node-2中的R1-2副本升级为P1即primary shard,这时因为少了一个R1的副本,但是primary shard全部处于active状态,集群状态为yellow。status = yellow。
3)第三步,重启node-1节点,因为缺少R1副本,new master node即node-2会将缺失的副本 copy replica一份给node-1,node-1根据缺失的数据进行同步。status = green。
五、ES的并发问题
ES对于常见的并发问题处理使用的是乐观锁机制
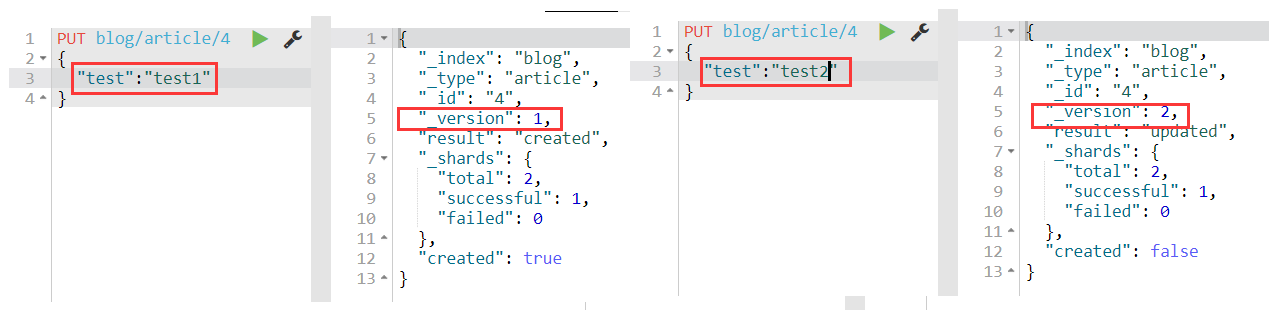
5.1._version元数据
当用户对某个document进行修改或删除时,_version这个元数据都会加一。注意,这里删除也会加一,删除后再次新增那个相同的docment,_version元数据会在之前的基础上加一,这也反映了删除操作并没有直接物理删除。
例新增再修改:
删除操作再新增:
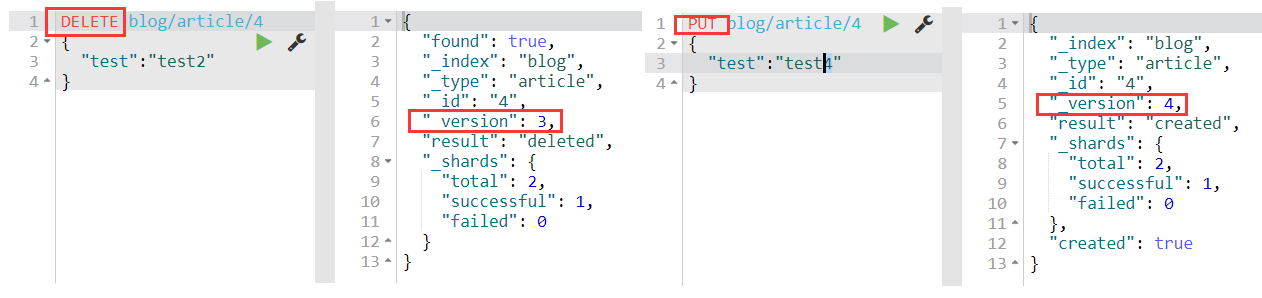
可以看到新增一次,修改一次,删除一次,再次新增,_version最后为4,符合预期
5.2.版本号同步问题
当document数据修改时,需要同步到replica中,注意!
ES的同步是多线程异步执行的,就会出现先同步的数据后到,后同步的数据先到的问题,这里ES对于这种问题的解决是,根据_version版本号进行比较,如果不同且版本号较大,进行更新,如果不同单版本号较小,不更新抛弃。
5.3.external version
external version:是es提供的一个feature,就是你可以不用他提供的_version来进行并发控制,可以基于自己的版本号来维护并发。
举个例子:es中的数据mysql中也有一份,并有自己的一套version机制,所以便不能再用es的来维护,便可以使用es提供的external version来进行并发控制。
external version具有一个条件,所提供的version必须比原本的_version大
六、ES对document操作原理
6.1.Document路由
我们知道,创建document时,ES会自动的讲document分配给某一个shard来保存,那么这是如何路由的呢?
6.1.1路由算法
路由算法:shard = hash(routing) % number_of_primary_shard
routing默认为主键id,hash()是一个es自带的函数,会产出一个hash值
例如:3个shard的集群保存id为12的document,好比hash(12)=4,这个是随便说的,因为hash(12)我们不知道是多少,那么shard = 4%3=1,即存放到P1 shard上。
6.1.2.routing设置
默认routing是_id,但是也可以手动指定routing,比如说put /index/type/id?routing=user_id
6.1.3.primary shard数量不可变
这里我们就可以知道为何primary shard的数量不能变了。
如果改变,用户想查询_id为12的数据,就如上面的例子来说,通过路由算法计算,shard=4%4,得到P0 shard,ES请求P0获取数据,但是没有找到,就会出现问题,因为数据保存在P1上。
6.2.ESdocument增删改原理
- es选择一个节点,作为协调节点
- 协调节点根据计算找到document存放shard的位置,将请求转发到对应shard存放的node上
- 实际存放的shard处理请求,并同步到replice副本上
- 协调节点发现primary shard和replice shard搞定后,返回给es结果
6.3.ES的写一致性
在ES5.x版本之前,使用consistency参数来设置写一致性,这里被废弃了就不介绍了,现在使用wait_for_active_shards参数来设置写一致性。
wait_for_active_shards=4,例如此,设置参数值为4,即primary shard的活跃数量必须大于等于4才可以对document进行写操作,如果小于4会一直处于等待状态,默认为1分钟,我们来测试下。
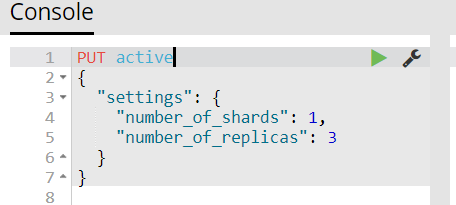
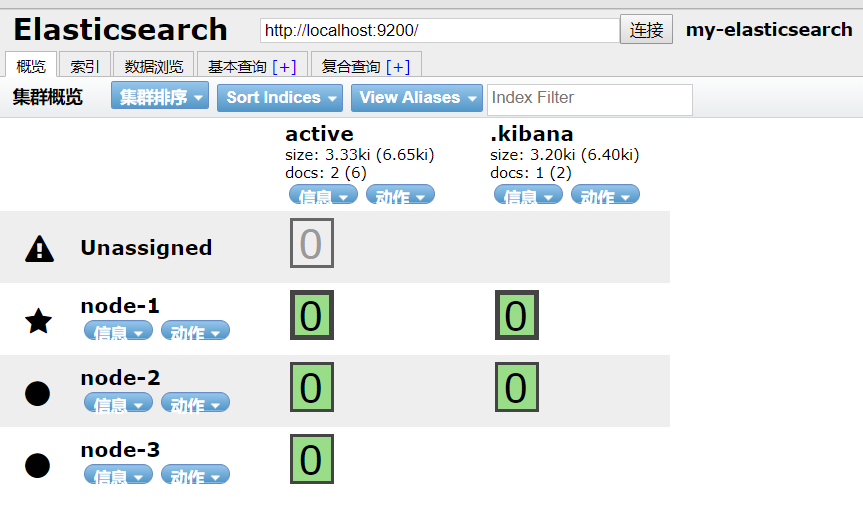
1)我们启动2个节点,并创建索引,设置其primary shard为1,replica为3
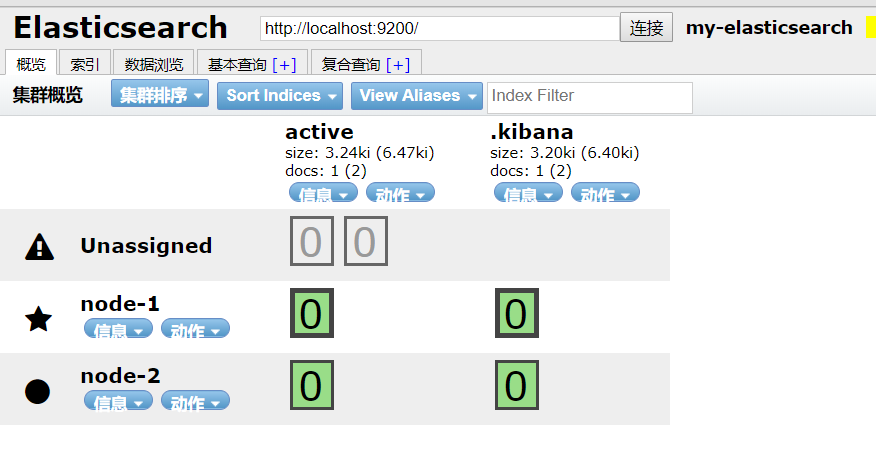
可以看到现在活跃了2个节点,P0和R0-1
2)这时向索引中写入document,设置wait_for_active_shards为2,即只要有2个节点活跃便可以写入
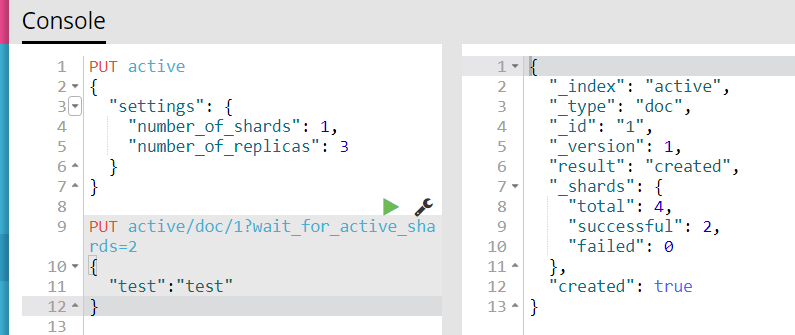
写入成功
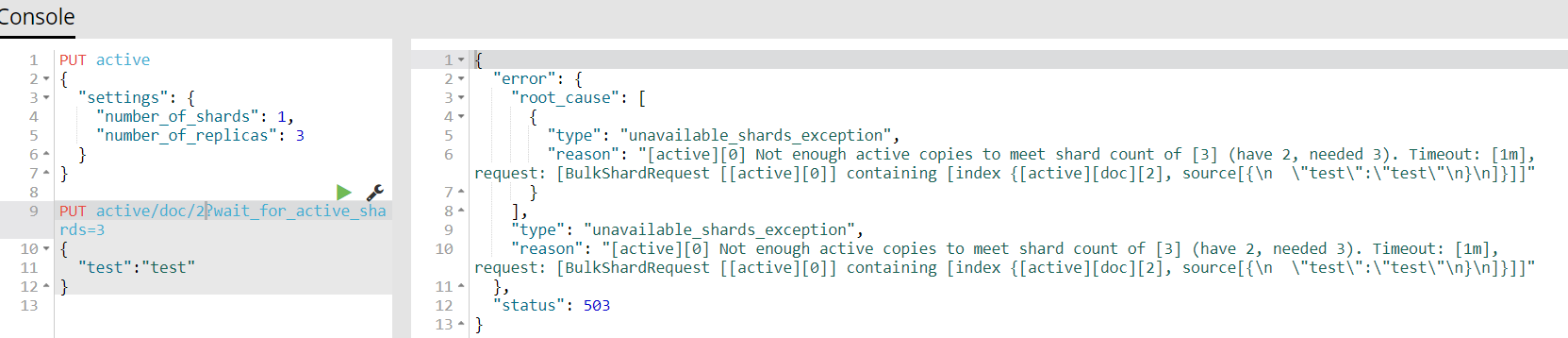
3)我们将wait_for_active_shards设置为3试一下
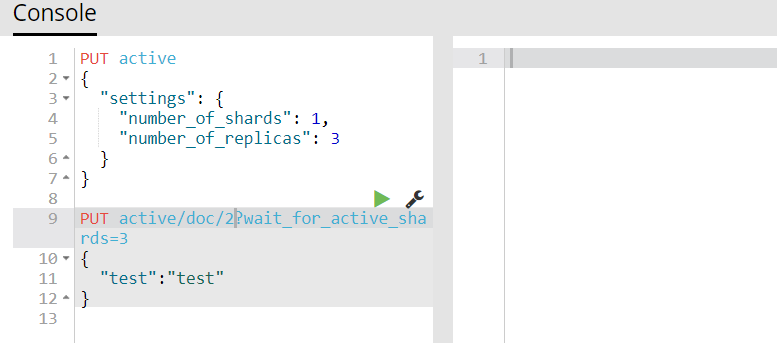
会发现处于等待状态,等待1分钟后,如果没有新的节点插入进来便会报错
4)我们再次请求,但是我们这次再等待时再启动一个节点试一下,即会有3个active状态的shard
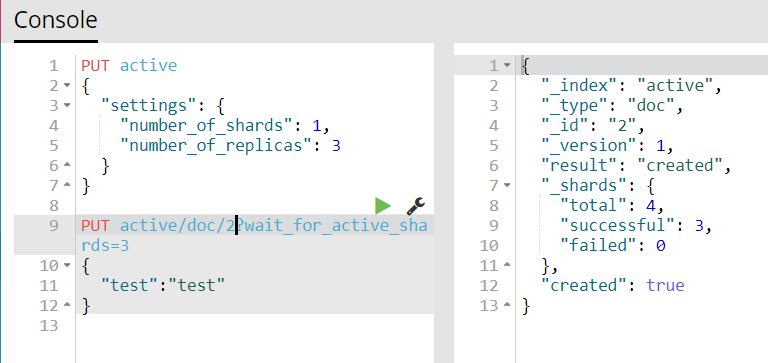
启动成功的一瞬间就写入进去了,和我们预想的一样。
我们可以发现超时时间为1分钟,当然我们也可以设置这个超时时间,再参数上加上timeout即可,默认为毫秒,
PUT active/doc/2?wait_for_active_shards=3&timeout=30s,在后面加上s即30秒
6.4.Document的检索原理
ES对Document的检索,其内部执行顺序为:
- ES选择一个node为协调节点
- 协调节点根据document的_id与主分片数量进行计算,找到该document存放的shard
- 因为shard分为主分片和副本分片,协调节点会使用round-robin轮训算法把,在primaryshard和replica选择一个,达到负载均衡的效果(如:4次请求,2次给primary,2次给replica)
- document数据返回给协调节点,协调节点返回给客户端
这里会有一种特殊情况:当document刚刚创建还没来得及同步副本,客户查询时发请求给replica,这时会查不到数据,便会转头将请求给主分片,并返回结果。
6.5.Document批处理原理
6.5.1.批处理底层实现
当我们使用bulk进行批量请求document时,ES底层是如何做的呢?
1 | {"action": {"meta"}}\n |
- 根据换行符分割成多个json串
- 对两个一组的json进行读取meta,路由document
- 直接将json发送给所在位置的node进行处理
- 一条条顺序执行,这里如果进行增删改操作,当主分片处理完后会对应同步副本分片,当副本分片完成后才会执行下一个操作。
- 所有操作执行完后,会返回给客户端
6.5.2.批处理格式问题
这里可以看到,es对于批处理操作有着严格的格式规范,这也是为了高效率的查询。
比如我们使用平常的json格式请求:
1 | [ |
es底层会先将json数组解析成jsonArray,这时内存就会有2份相同的json拷贝,问题来了,如果json数量很多,两份json即占用双倍内存,性能会大大降低,还有可能会出现oom异常。